Bioinspired Active Sensing: Snake-Tongue Odor Sampling Robot
@ CMU — Bioinspired Robot Design & Experimentation
Introduction
Passive chemical sensors wait for odor molecules to drift to them — which fails in low-flow environments where diffusion is slow. Snakes solve this by actively flicking their bifurcated tongues to sweep airborne molecules toward their vomeronasal organ. This project asks whether that same strategy improves robotic odor detection, and what flicking frequency maximizes it.
We built a robotic tongue that reproduces the snake flicking mechanism and ran controlled experiments measuring how oscillation frequency affects odor particle uptake speed.
Methods
1. Flicking Mechanism Design
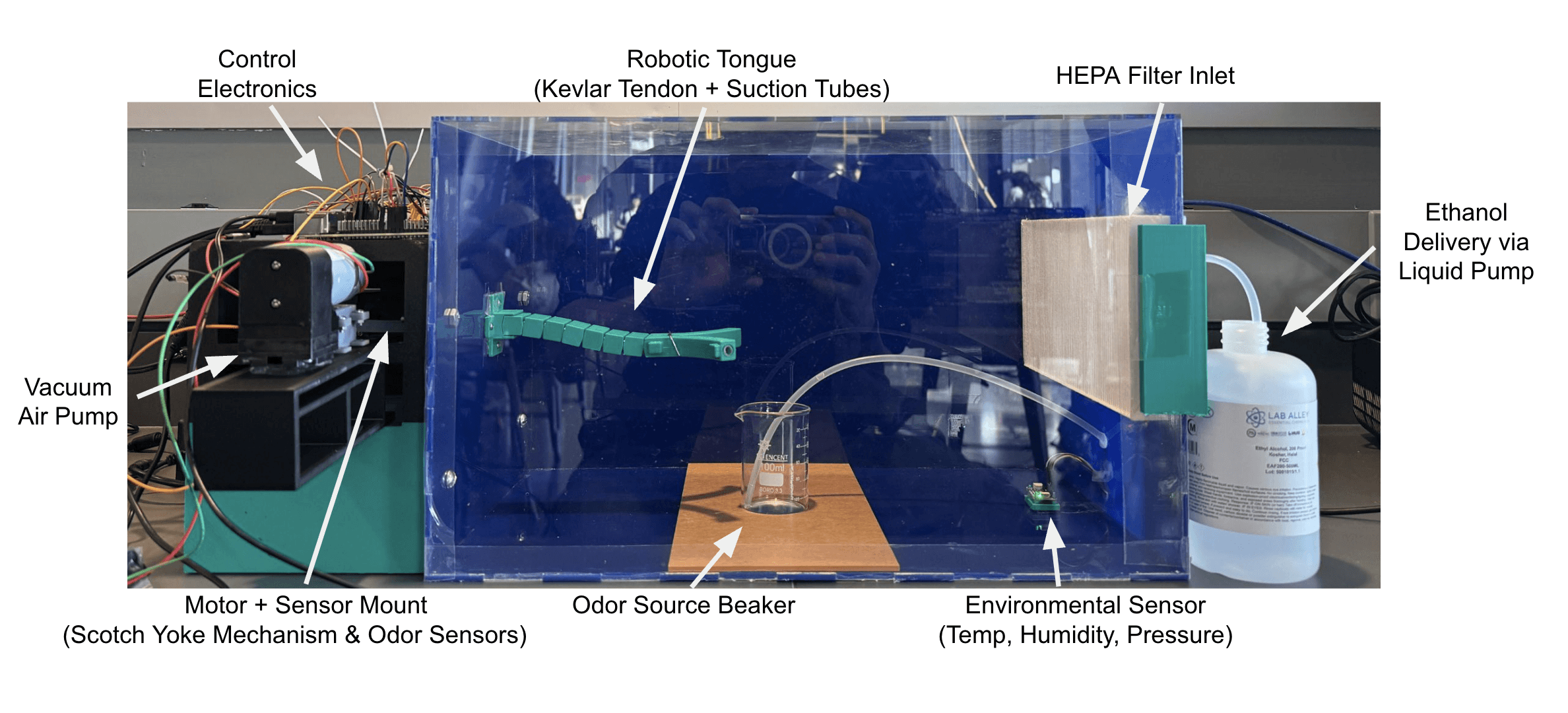
A Scotch-yoke mechanism drives controlled tongue oscillation via Kevlar tendons. Two silicone suction tubes at the tip collect odor particles and route them to the gas sensor. Motor selection, driver configuration, and a 12V power and protection circuit were designed and built from scratch.

2. Experimental Setup
The tongue operates inside a sealed chamber with a fixed ethanol source. A liquid pump injects a consistent ethanol dose per trial. Onboard sensors record temperature, humidity, and chamber pressure to control for environmental variation.
3. Sensing Protocol
Gas sensor voltage was measured across five flicking frequencies — 0, 0.44, 0.50, 0.56, and 0.62 Hz — with three trials per condition. The 0 Hz condition served as the passive baseline.

Results

Active Flicking vs. Passive Baseline
Passive trials at 0 Hz showed only baseline drift with no meaningful signal increase — confirming active sampling is essential for particle uptake in low-flow conditions.
Optimal Frequency
Flicking at 0.56 Hz produced the fastest detection, reaching 90% of peak voltage in approximately 85 steps — the clear optimum across all conditions tested.
Under and Over-Sampling
At 0.44 Hz, detection slowed to ~175 steps — insufficient oscillation to draw adequate particle volume. At 0.62 Hz, performance degraded again to ~180 steps, suggesting mechanical and sensor response limits were exceeded.
Discussion
A distinct optimal flicking frequency emerges where oscillation rate aligns with sensor response dynamics to maximize detection speed. Too slow and insufficient particles are captured. Too fast and the mechanical system and sensor can no longer keep up. The existence of this optimum validates the core bioinspired hypothesis — active sampling outperforms passive, but only within a functional frequency window.
Trial-to-trial variability increased at higher frequencies, pointing to mechanical instability in the Scotch-yoke at speed and pump timing delays as the primary sources of noise. Both are addressable through tighter mechanical tolerances and synchronization control.
My Contributions
Designed and built the full actuation system: motor selection, Scotch-yoke mechanism integration, motor driver configuration, and 12V power and protection circuit.
Developed all control software: PWM sweep tool for activation threshold identification and frequency-controlled actuation script for reproducible oscillation across trials.
Integrated actuation, pump control, odor-collection tubing, and environmental sensing into a single functional platform.
Led troubleshooting and calibration across mechanical, electrical, and sensor-drift issues.
Executed and analyzed experiments across all frequency conditions.