Robotic Manufacturing Process Optimization
@ Biorobotics Lab, CMU [Manuscript in Preparation]
Introduction
Inkjet systems offer micron-level deposition precision but are designed for flat, tabletop surfaces. Extending that precision to meter-scale, curved, and complex 3D geometries using large industrial robots introduces a different problem: robots have the reach, but suffer from compliance, drift, and orientation sensitivity that degrade print quality.
This project develops surface modeling, trajectory generation, and computer vision-based error analysis methods to characterize and compensate for deposition error across geometrically complex surfaces — including cylinders, curved sheets, and Möbius-strip geometries.
Methods
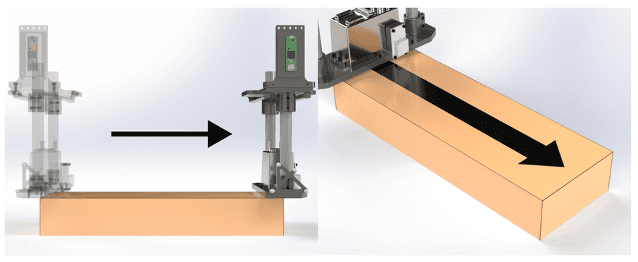
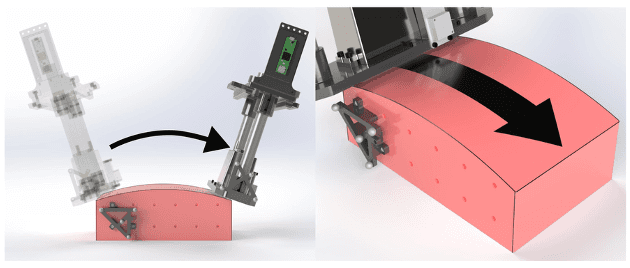
1. Surface Modeling & Test Geometries
To understand how curvature affects print quality, we built a library of test surfaces ranging from flat and cylindrical to topologically complex shapes like the Möbius strip. Each surface was designed to isolate specific sources of deposition error — curvature, orientation change, and surface continuity.
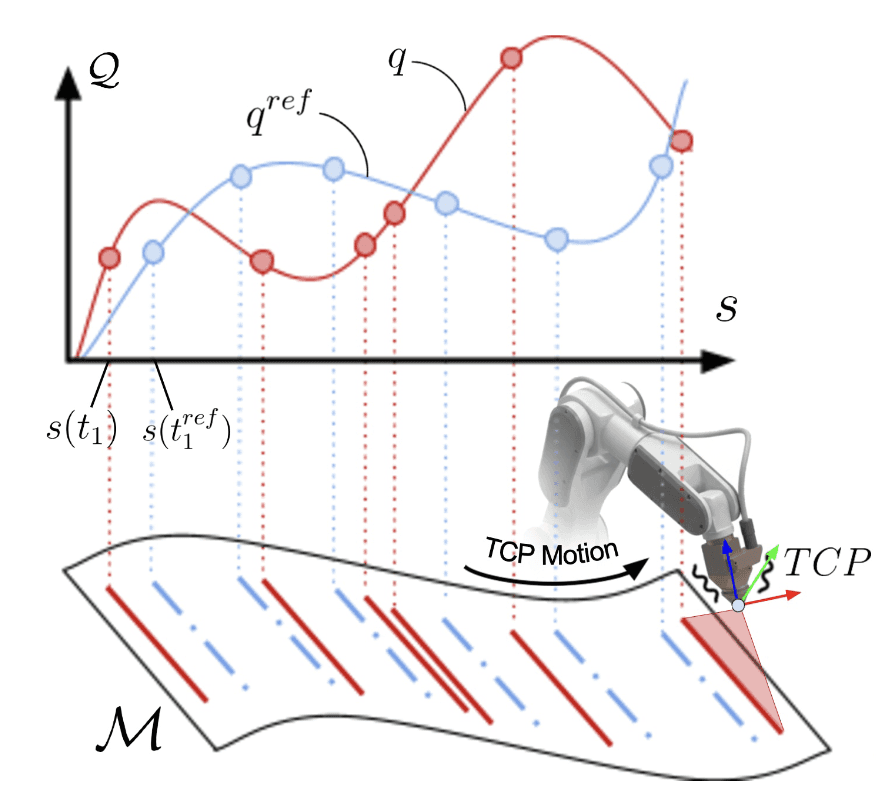
2. Trajectory Generation
Surface-aligned toolpaths maintain consistent sampling density and ink deposition direction across curved surfaces. Trajectories are evaluated for sensitivity to orientation changes imposed by the geometry, providing a baseline for characterizing where drift originates.
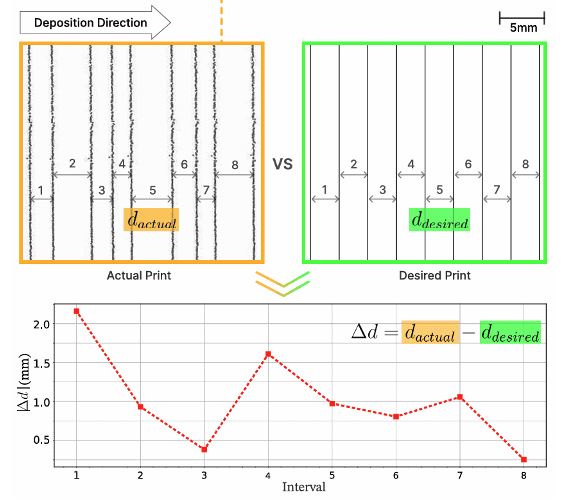
3. Computer Vision for Deposition Analysis
Printed outputs are scanned and processed through an automated vision pipeline that extracts dot positions, spacing, deformation, and local drift. This enables quantitative comparison of print accuracy across surface types and disturbance conditions without manual measurement.
4. Data Analysis and Evaluation
Trial data is aggregated to compute spacing deviation, variance, and repeatability across surfaces and robot configurations — directly characterizing how geometry and compliance interact to degrade deposition fidelity.

Results
Printing Across Complex Geometries
The system successfully printed dot grids on flat surfaces, cylinders, and Möbius-strip geometries with consistent spacing accuracy across all tested configurations.
Predictable Drift Patterns
Spacing deviation analysis revealed drift patterns tied to tool compliance and surface curvature — predictable enough to inform trajectory compensation strategies.
Sub-Millimeter Error Quantification
The vision pipeline resolves deviations at sub-millimeter scale, enabling direct geometry-to-geometry comparison and quantitative evaluation of compensation methods.
Discussion
The core finding is that deposition error is not random — it correlates predictably with surface curvature and robot compliance. This predictability is what makes compensation tractable: if drift follows geometry, trajectory planning can account for it upstream rather than correcting it after the fact.
The Möbius strip geometry was the hardest test case — continuous orientation change with no repeating symmetry — and its results defined the upper bound of what the current system can handle without active compensation.
My Contributions
CAD-modeled test surfaces including the Möbius strip geometry and generated supporting surface visualizations.
Developed the computer vision pipeline for automated dot extraction and spacing error quantification.
Implemented the data analysis framework for computing spacing deviation, variance, and drift across trial conditions.
Produced trajectory simulation tools used during Möbius surface evaluation.
Assisted with experimental setup, printing runs, and scan processing.